achievement
成果转化
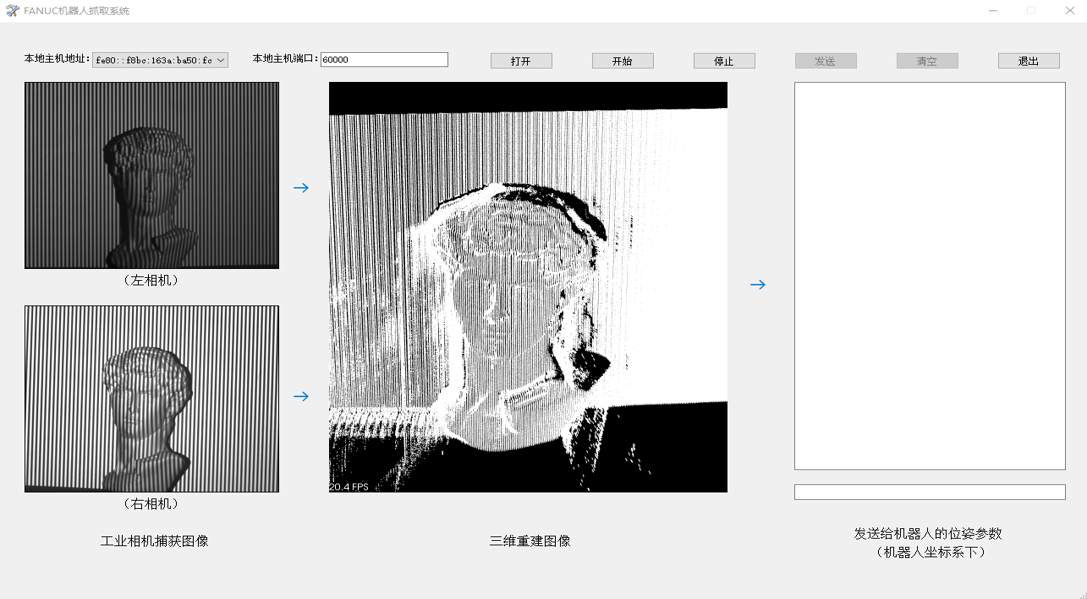
该技术的主要思想是对视觉传感器采集到的目标物体的图像进行三维重建,计算出目标物体在世界坐标系中的位姿,然后利用世界坐标系与机器人坐标系之间的相对位姿关系计算出目标物体在机器人坐标系中的位姿。
公司网址:www.hbxcznjd.com
公司电话:0715-8902988
公司邮箱:hbxcznjd@163.com
公司地址:湖北省咸宁市高新区贺胜路职教园路口创业孵化城
企业微信