基于机器视觉的机器人系统关键技术研究
该技术的主要思想是对视觉传感器采集到的目标物体的图像进行三维重建,计算出目标物体在世界坐标系中的位姿,然后利用世界坐标系与机器人坐标系之间的相对位姿关系计算出目标物体在机器人坐标系中的位姿。再将目标物体的该位姿发送给FANUC六轴工业机器人,让机器人对目标物体实施抓取。
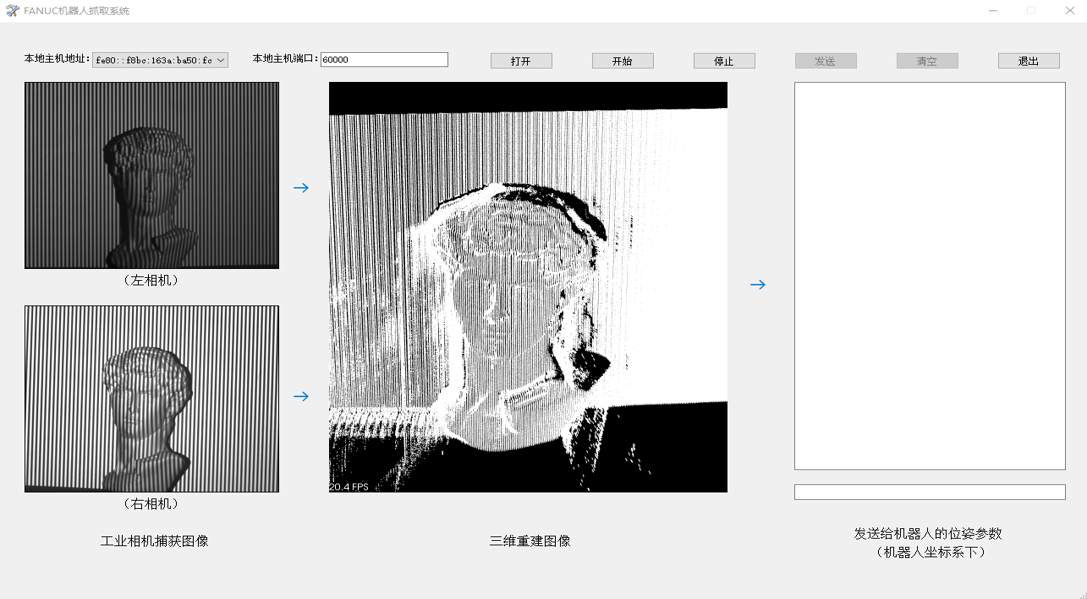
演示视频如下:
上一条:
下一条:
没有了

